Edited by Dr. Giovanni Chetta
The specific motion of man
The specific motion of man can be defined as the set of dynamic, energetic and informative events that converge in the bipodal alternating gait (motion with progression) and in the standing position (motion without progression).
Of all the structures of the central nervous system, more than a quarter participate directly and more than half indirectly in the planning and execution of movements; therefore, man, with his 650 muscles and 206 bones, is primarily a "motor animal" .
In fact, man needs to move for his own survival and well-being. For this reason, locomotion is the activity that takes precedence over all others. In fact, in the world of life at the highest level is the specific movement of man, which represents the most complex natural process. they recognize the first origin in the acquisition of the bipodal morpho-mechanical condition; the liberation of the hands is a corollary of this (Paparella Treccia, 1988). The motor functions and the body, considered in many cultures as inferior entities and subordinate to cognitive activities and the mind, are instead at the origin of those abstract behaviors we are proud of, including the very language that forms our mind and our thoughts ( Oliviero, 2001). In the embryonic, fetal and early childhood phases, action precedes sensation: reflex movements are made and then they are perceived. It is from the proprioceptive reflexes that mental representations (engrams) are born that allow the birth of complex motor skills and of the same ideas. In critical moments (intense stress), the muscular system constitutes a high priority system: when activated, the others systems, such as those responsible for the perception of sensations, attention, cognitive activities, etc., are in a state of relative blockage, as this state is linked in the unconscious to the execution of actions important for survival, such as escape, the attack, the search for food, for a sexual partner, for the nest. Finally, today we know how much the simple walk in a natural habitat is a very powerful rebalancer of the two cerebral hemispheres.
The current human body is therefore above all the consequence of the need to perform a walk of maximum efficiency on two feet in the gravitational field on a naturally uneven ground. According to this theory, man must be able to move with a minimum consumption of energy at the " internal of a constant gravitational field, with the corollary that during the walk the various structures (muscles, bones, ligaments, tendons, etc.) are subjected to minimal stress.

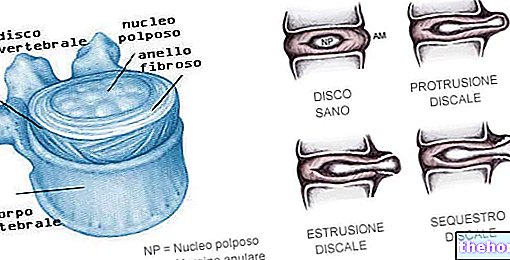
- The facets and intervertebral discs they do not prevent rotation but favor it; the vertebrae were not built for static structural stability. In fact, the lumbar lordosis together with the lateral flexion mechanically induces, through a mechanical torque system, a torsion of the vertebral column.
- The role of lower limbs it is secondary to that of the spine. They alone are unable to rotate the pelvis to allow motion but they can amplify movement.
The lower limbs, in fact, derive from the evolutionary need to develop the speed of the motion of man. The greater power required for this purpose cannot derive from the muscles of the trunk, which for this purpose should have developed a mass which is impossible from the point of view of the human body. "footprint. Evolution therefore had to prepare additional muscles, placing them, both for functional and spatial reasons, outside the trunk, ie on the lower limbs. The first task of the lower limbs is therefore to provide the energy that allows us to move at high speeds. Thanks to them, intervertebral movements, rotations on the transverse plane in particular, can take advantage of the complementary contribution of the hamstring muscles (hamstring, semitendinosus and semimembranous) to which the spine is connected through specific and considerable anatomical myofascial chains:
- sacrotuberous ligament-longissimus lumborum muscle (located on the sides of the spine)
- sacrotuberous ligament and iliocostalis thoracis (in this way the right hamstring muscles control part of the left thoracic muscles and vice versa),
- gluteus maximus muscles - opposite great dorsal muscles (which in turn controls the movement of the upper limbs).




The foot is therefore not a system of arches or vaults, but also a very sophisticated helicoidal sensory-motor system (Paparella Treccia, 1978).
"The human foot is a" work of art and a masterpiece of engineering "
Michelangelo Buonarroti
The foot is a sensory-motor organ, a bridge between the system and the environment, consisting of a "variable pitch helix made up of 26 bones, 33 joints and 20 muscles that influences the whole body.
When the knee is in flexion, movements of the leg are possible both laterally (1-2 cm at the ankle) and in axial rotation (external rotation of 5 °). This is necessary to allow an optimal support of the foot in relation to the unevenness of the ground. In full extension, on the other hand, the knee, being subjected to important load forces, presents, in physiological conditions, a great stability; therefore a joint block occurs which solidarizes the tibia to the femur (Kapandji, 2002). Therefore, in the flexion condition, the knee is able to "filter" the rotations of the foot and leg while, when it is fully extended, these rotations are transferred integrally to the femur, influencing consequently the pelvic girdle (in particular, the coxo-femoral joint and the talus-scaphoid joint are similarly structured and correspondingly arranged).

In the reference position the ligaments of the hip are moderately stretched.In the external rotation all the strong anterior ligaments are tense (the tension is maximum at the level of the horizontal bundles, ie the ileo-pretrochanteric ligament and the pubo-femoral ligament) while the posterior ones (ischio-femoral ligament) are relaxed. the reverse occurs, the ischio-femoral ligament is stretched while the anterior ligaments are released (Kapandji, 2002).


The ratio between rotations in the transverse and frontal plane tends to the golden number of golden section, as well as the length ratio between various skeletal parts (e.g. hindfoot / forefoot length).
'The specific motion of man, one of the most admirable processes in nature, stands on the swirling pillars, custodians of the golden number, in themselves and in reciprocal relationships "(Paparella Treccia, 1988).
Using the gravitational field as a temporary reserve warehouse, the specific motion of man is of maximum energy efficiency: at each step, during the ascent of the center of gravity (deceleration phase), kinetic energy is stored in the form of potential energy for then be subsequently transformed back into kinetic energy during the descent of the center of gravity, accelerating the body forward and raising the center of gravity.

Praise to the propeller


' If a figure has been chosen by God as the dynamic foundation of his immanence in the forms, well this figure is the helix "(Goethe)
There force of gravity, both from a functional and structural point of view, it should not therefore be seen as an enemy; without it man could not exist.
Other articles on "Human motion and the importance of" breech support "
- Posture and tensegrity
- Scoliosis - Causes and Consequences
- Scoliosis Diagnosis
- Prognosis of scoliosis
- Treatment of scoliosis
- Extra-Cellular Matrix - Structure and Functions
- Connective tissue and Connective fascia
- Connective Band - Features and Functions
- Importance of correct breech and occlusal supports
- Idiopathic Scoliosis - Myths to Dispel
- Clinical case of Scoliosis and Therapeutic Protocol
- Treatment Results Clinical Case Scoliosis
- Scoliosis as a natural attitude - Bibliography